ajdelange
Well-Known Member
- First Name
- A. J.
- Joined
- Aug 1, 2019
- Threads
- 9
- Messages
- 2,883
- Reaction score
- 2,319
- Location
- Virginia/Quebec
- Vehicles
- Tesla XLR+2019, Lexus, Landcruiser, R1T
- Occupation
- EE Retired
I gather you are relatively new to BEV. I think your opinion on this will change as you garner experience.They should have plenty of data based on how much off road mileage they appear to have done to have a reasonably idea as to a ballpark loss in range when you hit a gravel road or go off-roading.
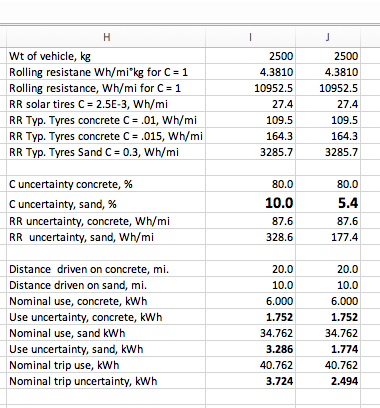
The reality is that you can't predict Wh/mi with much accuracy on a particular piece of road until you drive it. If your geo database shows it is uphill you can add gravitational load to the nominal and if you know you have a 20 mph headwind you can add drag load. But you can't know whether the road bed is wet or dry even if the observed weather at the nearest airport shows it is raining. Nor can you predict what the wind vector will be when you get to a particular location based on the last hour's METAR from an airport 20 miles away. Nor can you tell whether a dirt road was graded and oiled (do they still oil dirt roads?) this morning.
Given all this you must take predictions from ABRP and similar programs with a grain of salt (literally though the salt may be CaCl2 rather than NaCl). Whilst on your journey your best indicator as to how much battery you will have at destination is the amount you have at a particular point you you are currently using per mile.
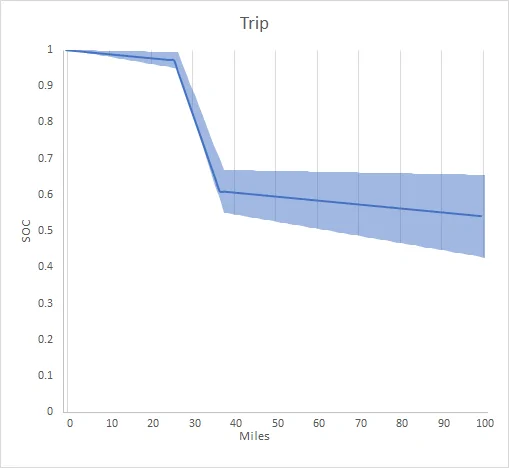
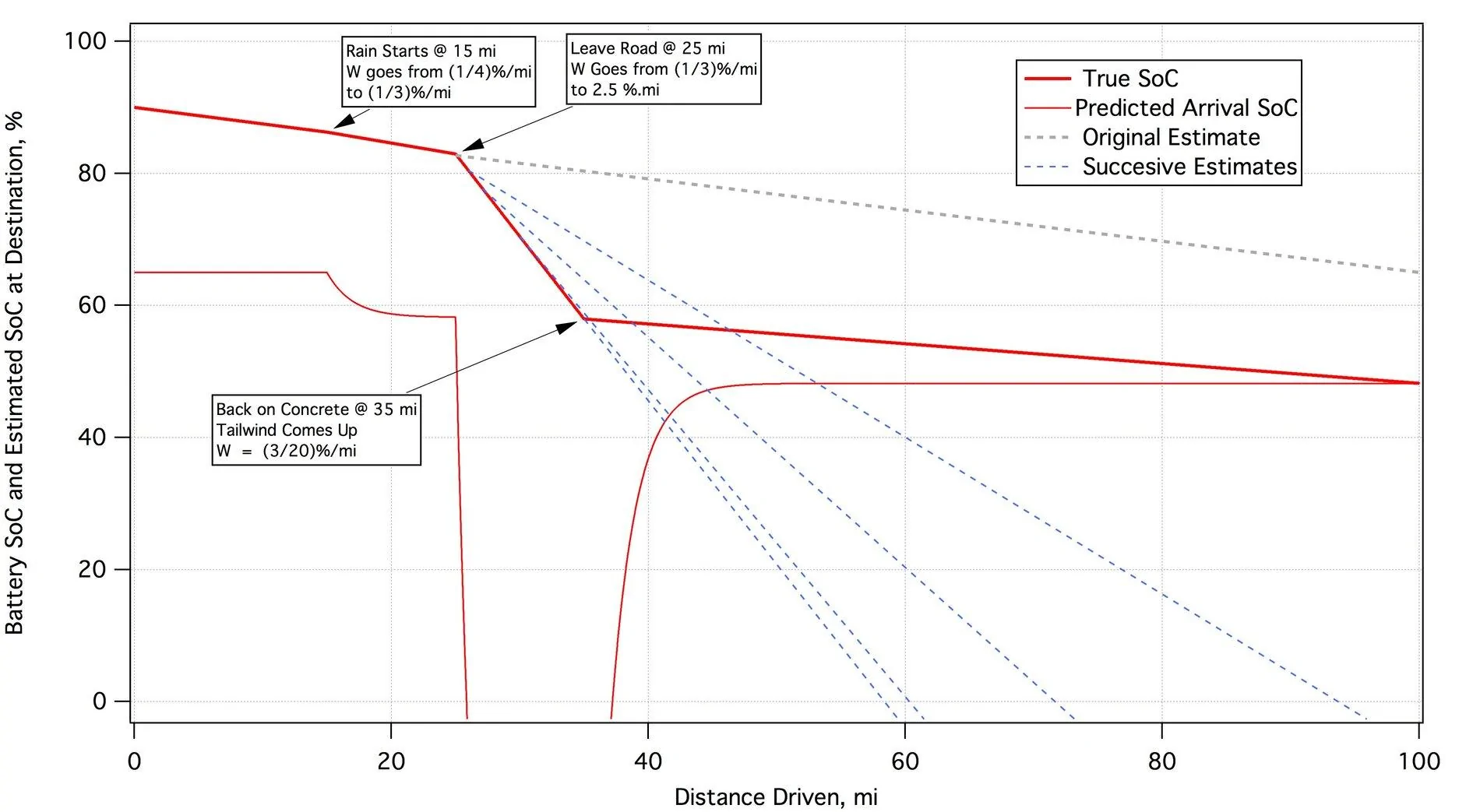
The following illustrates how this works in Tesla's implementation.
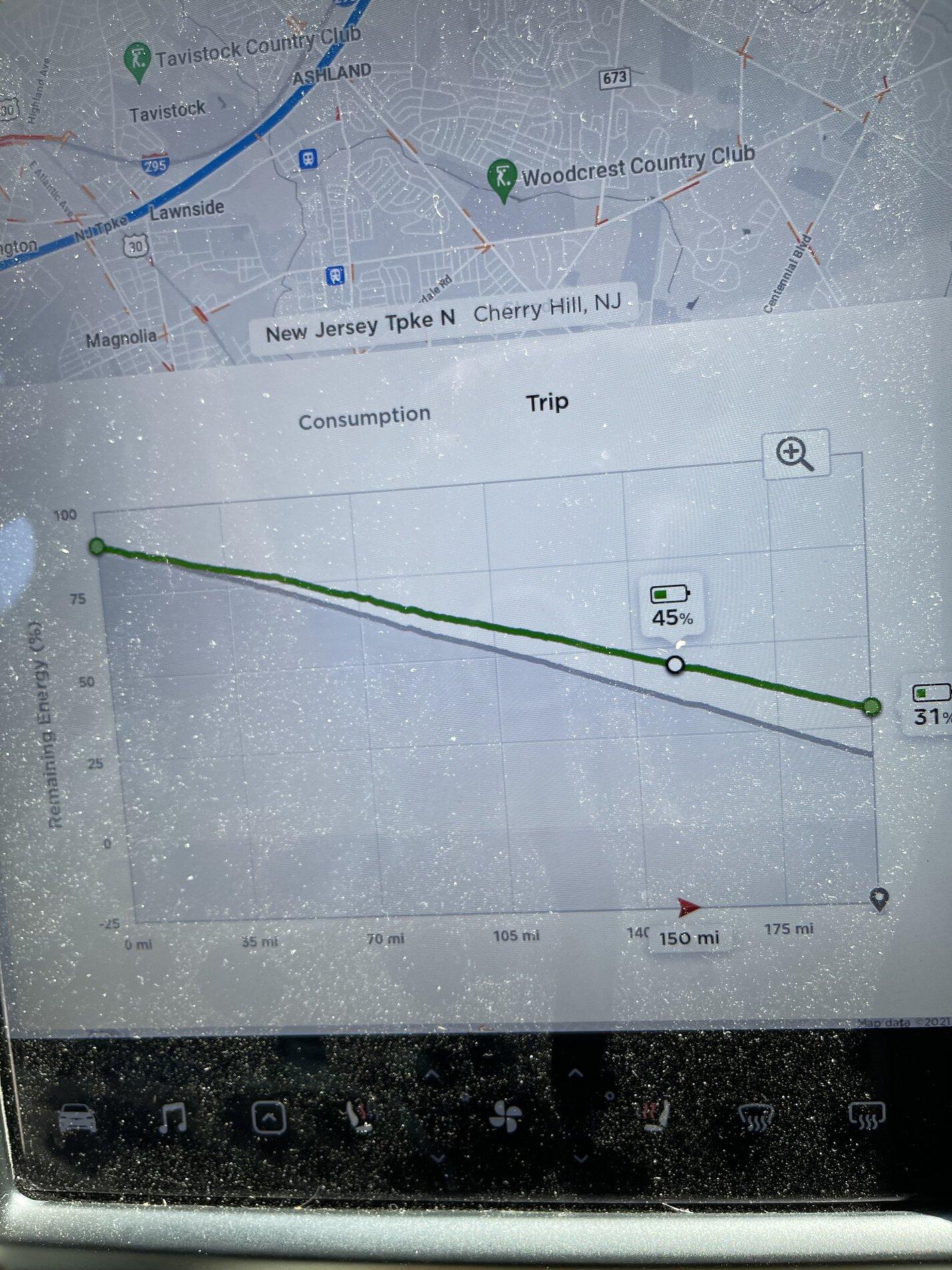
The lower line shows the vehicle's original expectations as to how the trip will go: Start with 90% SoC, arrive with 20%. The upper heavy line shows, up to the circle, the actual history. At 150 mi out we are at 45% SoC rather than the ariginally forecast 35%. In this case we are doing quite a bit better than we thought we would probably because of a tailwind. The algorithm projects to the destination assuming the recent utilization rate and what it knows about terrain, speed limit and weather (not really sure about weather) ahead of you. It cannot predict a storm coming up or the fact that roadwork has started and you have to drive in loose gravel or that the wind will veer from tailwind to headwind. If any of those events occurs then utilization zooms and the red curve dips as does it's end point.
Sponsored
Last edited:
")