mpshizzle
Well-Known Member
- Thread starter
- #1
Disclaimer: While the results of my testing and observations provide a high degree of certainty, none of this is 100% conclusive fact confirmed by Rivian. (But I'm still convinced)
Several months ago I made a post on how Gen 2 R1 is relying on an off-the-shelf Mobileye driver assistance system. (If you're interested in reading that one here's the link: Link Here)

If you look at the windshield on a Gen 2 R1 you can see two separate camera arrays, with different kinds of lenses, different materials, clearly made by different vendors. The single camera unit (The camera marked in red) is likely a mobileye unit. It's similar unit to the one found in Gen 1, though slightly higher end. The cameras in the other housing (marked in green) are presumably then the custom made Rivian cameras they were bragging about at Gen 2 launch.
In my previous testing, I found that ONLY the mobileye camera was used for driver assistance. I found this by using masking tape to cover the cameras. If the mobileye camera was covered, it would immediately pop up a warning on the dash saying that the camera was blocked and driver assistance features were unavailable. So then I tried the opposite. I covered every single camera on the vehicle (mirrors, bumpers... everything), and left ONLY the mobileye unit uncovered. In this scenario there was no warning on the dash, and highway assist worked perfectly, including lane changes. The only thing that was impacted was the driver's screen visualizations. They were pretty inaccurate, with only a bit of mobile eye data and some radar data to go off of.
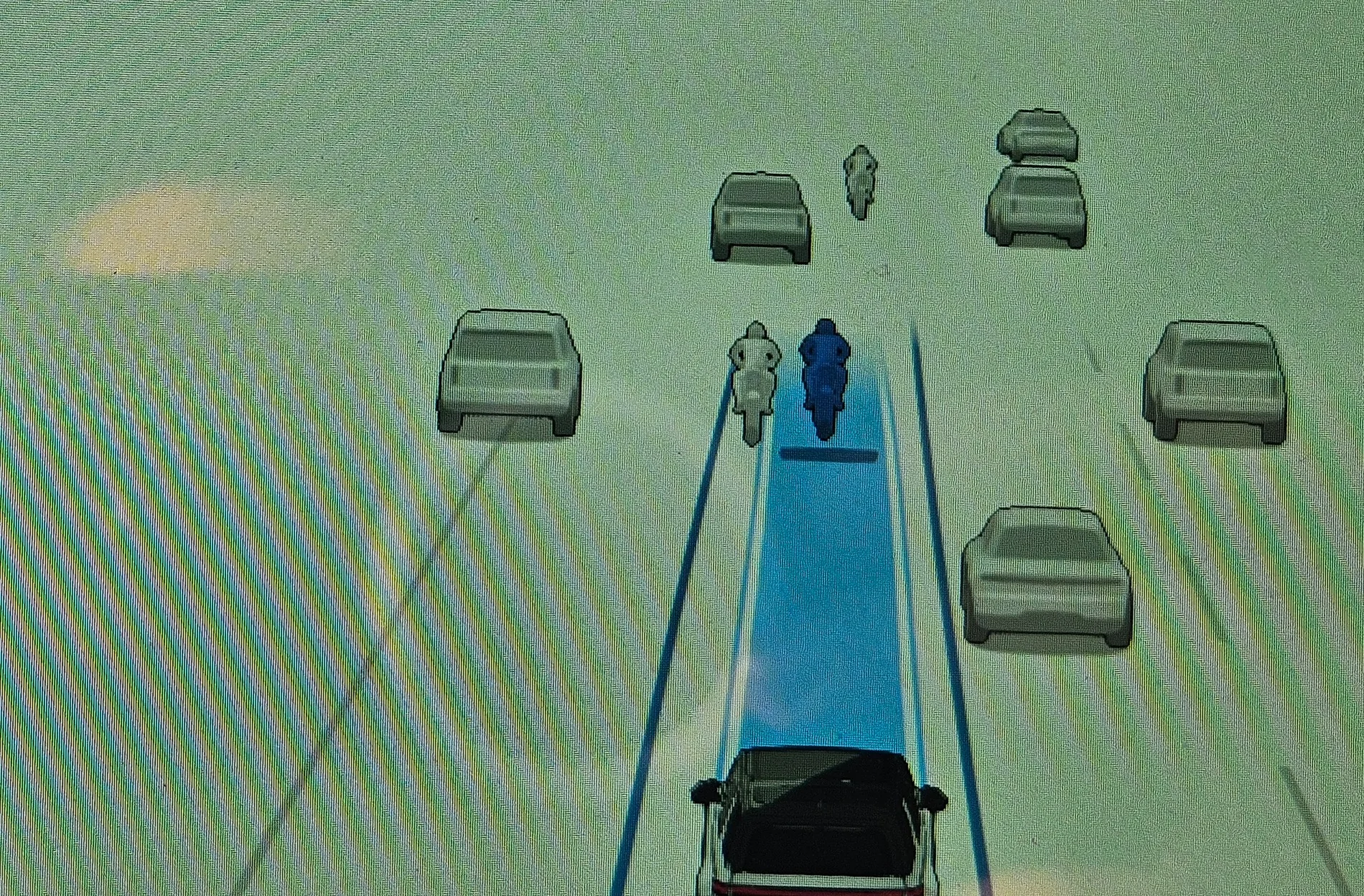
The conclusion that I drew was that the visualizations were (mostly) being driven by Rivan's system, but the actual driving was done by mobileye. Sometimes I was actually able to see artifacts of the two systems operating simultaneously on the screen.

In this photo there was only 1 motorcycle directly front of me. On occasion a lead vehicle would be duplicated, where one was highlighted in blue (indicating this is data coming from the highway assist system showin the vehicle it's following) and the other was not highlighted (probably coming from the Rivian system)
BUT this is where things get INTERESTING with the most recent update!
After driving a bit with 2025.26.30 I could tell something changed drastically under the hood. The release notes just have a few small improvements around lane line visibility, the visualizations, etc. But the highway assist behavior was different enough I could tell there was more to it. With this update, the system seems to be FAR more aware of its surroundings. It doesn't get caught by surprise as much when another vehicle cuts in. Initiating a lane change is also far smoother. With that said there are also some pretty significant regressions in this version. In lane stability seems to be worse. It wanders around in the lanes more, and even will cross lines at times (I think this may actually be a good sign, but more on that later). It also seems to have a hard time with lane changes over small-dashed lines - it seems to think they're solid lines fairly often. Two steps forward, one step back.
Mobile Eye Camera Covered Up
Rivian Cameras Covered Up (And a REALLLLLY CRAPPY photo of it!)
So I redid the tape test. And this time the results confirmed my suspicion that the underlying highway assist system changed completely under our noses on this update with no mention in the release notes. It was completely opposite behavior from before. Covering the Rivian cameras resulted in an immediate dash warning saying driver assistance was unavailable. Covering the mobileye camera resulted in no warnings. Additionally, highway assist worked perfectly, without complaint.
What does this mean for the future?
Well I think it's a GREAT sign! Even though there is a bit of regression, it's a HUGE step to have things running on Rivian's own AI system. This will unlock the REAL potential of RAP. As far as why I think the in-lane wandering is a good thing: I suspect this is a result of leaning more heavily on perception (what the vehicle is seeing) instead of mapping data. With this shift, I suspect we are not far off from seeing the end of geo-locking to highways. To be sure, the system needs more training and work before then, but I think it's a great sign of things to come.
What are your thoughts?
Several months ago I made a post on how Gen 2 R1 is relying on an off-the-shelf Mobileye driver assistance system. (If you're interested in reading that one here's the link: Link Here)
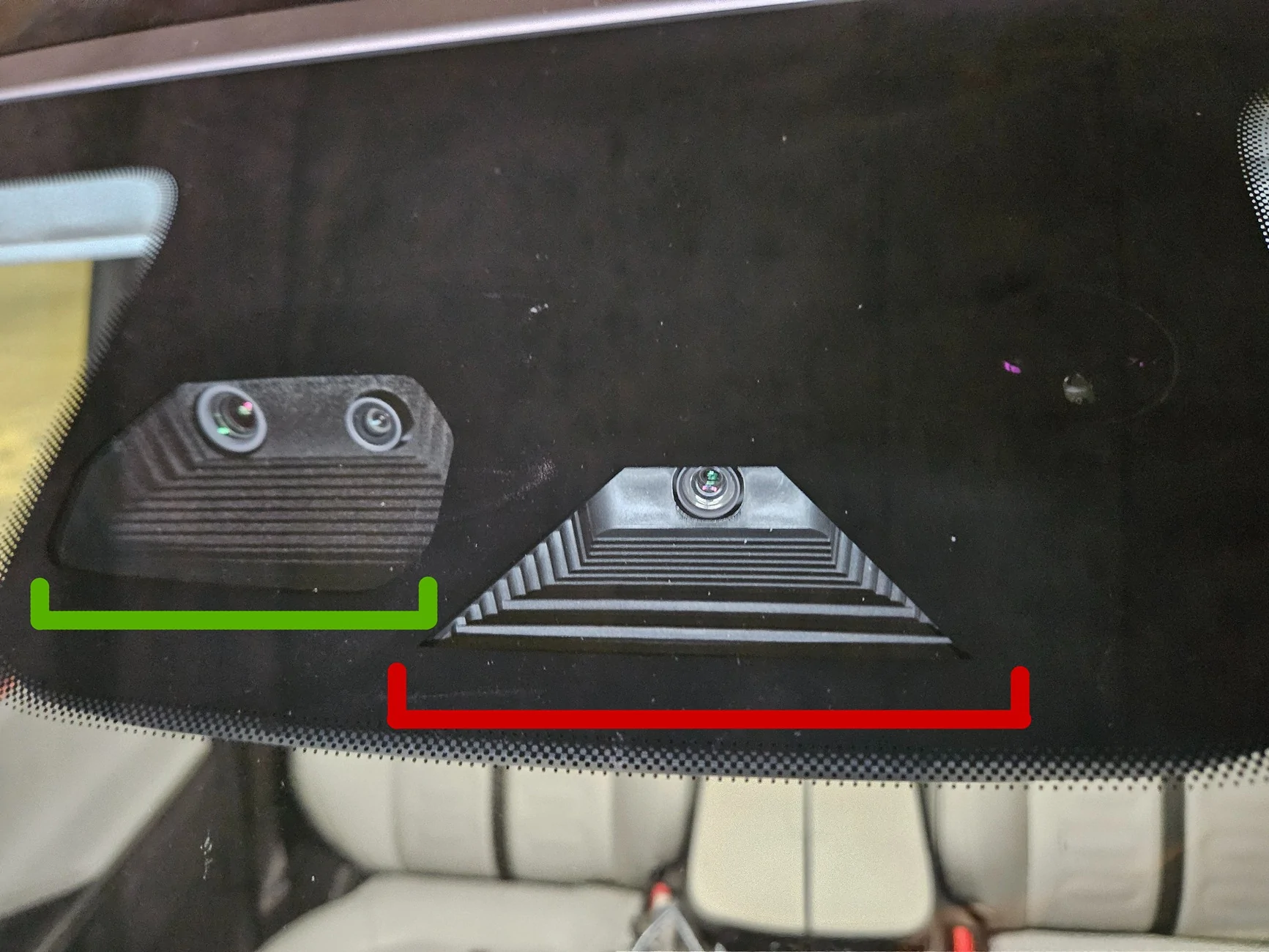
If you look at the windshield on a Gen 2 R1 you can see two separate camera arrays, with different kinds of lenses, different materials, clearly made by different vendors. The single camera unit (The camera marked in red) is likely a mobileye unit. It's similar unit to the one found in Gen 1, though slightly higher end. The cameras in the other housing (marked in green) are presumably then the custom made Rivian cameras they were bragging about at Gen 2 launch.
In my previous testing, I found that ONLY the mobileye camera was used for driver assistance. I found this by using masking tape to cover the cameras. If the mobileye camera was covered, it would immediately pop up a warning on the dash saying that the camera was blocked and driver assistance features were unavailable. So then I tried the opposite. I covered every single camera on the vehicle (mirrors, bumpers... everything), and left ONLY the mobileye unit uncovered. In this scenario there was no warning on the dash, and highway assist worked perfectly, including lane changes. The only thing that was impacted was the driver's screen visualizations. They were pretty inaccurate, with only a bit of mobile eye data and some radar data to go off of.
The conclusion that I drew was that the visualizations were (mostly) being driven by Rivan's system, but the actual driving was done by mobileye. Sometimes I was actually able to see artifacts of the two systems operating simultaneously on the screen.
In this photo there was only 1 motorcycle directly front of me. On occasion a lead vehicle would be duplicated, where one was highlighted in blue (indicating this is data coming from the highway assist system showin the vehicle it's following) and the other was not highlighted (probably coming from the Rivian system)
BUT this is where things get INTERESTING with the most recent update!
After driving a bit with 2025.26.30 I could tell something changed drastically under the hood. The release notes just have a few small improvements around lane line visibility, the visualizations, etc. But the highway assist behavior was different enough I could tell there was more to it. With this update, the system seems to be FAR more aware of its surroundings. It doesn't get caught by surprise as much when another vehicle cuts in. Initiating a lane change is also far smoother. With that said there are also some pretty significant regressions in this version. In lane stability seems to be worse. It wanders around in the lanes more, and even will cross lines at times (I think this may actually be a good sign, but more on that later). It also seems to have a hard time with lane changes over small-dashed lines - it seems to think they're solid lines fairly often. Two steps forward, one step back.

Mobile Eye Camera Covered Up

Rivian Cameras Covered Up (And a REALLLLLY CRAPPY photo of it!)
So I redid the tape test. And this time the results confirmed my suspicion that the underlying highway assist system changed completely under our noses on this update with no mention in the release notes. It was completely opposite behavior from before. Covering the Rivian cameras resulted in an immediate dash warning saying driver assistance was unavailable. Covering the mobileye camera resulted in no warnings. Additionally, highway assist worked perfectly, without complaint.
What does this mean for the future?
Well I think it's a GREAT sign! Even though there is a bit of regression, it's a HUGE step to have things running on Rivian's own AI system. This will unlock the REAL potential of RAP. As far as why I think the in-lane wandering is a good thing: I suspect this is a result of leaning more heavily on perception (what the vehicle is seeing) instead of mapping data. With this shift, I suspect we are not far off from seeing the end of geo-locking to highways. To be sure, the system needs more training and work before then, but I think it's a great sign of things to come.
What are your thoughts?
Sponsored
